MicroPython Tutorial
Getting Started with MicroPython
- Building MicroPython for ESP32
- MicroPython: Input and Output
- Installing MicroPython for ESP8266 & ESP32
- MicroPython Libraries
- MicroPython: Motor Control
- MicroPython: Networking
- NodeMCU (ESP8266)
- MicroPython on the OHMC LoliBot
- WebREPL and WebPad
- MicroPython on the Witty Cloud
- MPY-TUT
- esptool.py
- esptool.py test cases README
- mpy-webpad
- WebREPL client for MicroPython
MicroPython: Input and Output
This should work on either ESP8266 or ESP32 MicroPython, but the instructions are written for ESP8266. There are minor differences, eg: the numbers of pins and their capabilities.
The number of pins, and their capabilities, varies between ESP8266 and ESP32, and not all pins are available on all boards.
Digital Outputs
To control an output pin, you must first configure it. The machine library
makes the pins available to your Python code, and let’s you specify how you
want to use that pin. To configure a pin as a digital output::
import machine
pin = machine.Pin(2, machine.Pin.OUT)
Example: ESP-12
Note: On the LoLin32Lite, used in the LoliBot, there’s an equivalent blue LED on pin 22
On the ESP-12 module, GPIO2 is connected to an on-board LED, so you should be able to turn the LED on and off:
pin(True)
pin(False)
Note that it is connected backwards: to turn the LED on, set the pin value to False and to turn it off set the pin value to True.
Of course you can do this in a loop to get ‘blinky’, the microcontroller equivalent
of print('hello world'):
import machine
import time
pin = machine.Pin(2, machine.Pin.OUT)
while True:
pin(True)
time.sleep(1)
pin(False)
time.sleep(1)
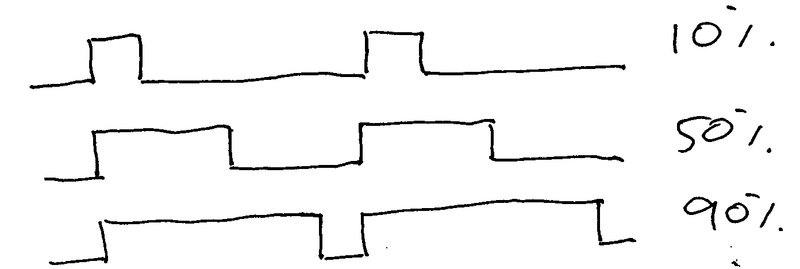
PWM Outputs
You can also turn the LED “partly on” by turning it on and off rapidly. Doing this in Python would be flickery and a waste of power, but thankfully there’s hardware support for pulse-width modulation (PWM). This just means turning the pin on and off rapidly, and it lets you set the proportion of the time the LED is on, called the ‘duty cycle’:
To configure a pin as PWM, wrap the machine.Pin object in a machine.PWM object:
import machine
pin = machine.Pin(2, machine.Pin.OUT)
pwm = machine.PWM(pin)
pwm.freq(1000)
pwm.duty(512)
freq sets the frequency (in Hz) and duty sets the duty cycle between 0 (always off)
and 1023 (always on). Beyond about 30Hz, the LED will no longer appear to be flashing,
instead it will be changing in perceived brightness.
This lets you fade the LED in and out like so:
import machine
import time
pin = machine.Pin(2, machine.Pin.OUT)
pwm = machine.PWM(pin)
pwm.freq(1000)
while True:
for d in range(0,1024,8):
pwm.duty(d)
time.sleep(0.01)
for d in range(1024,0,-8):
pwm.duty(d)
time.sleep(0.01)
Yay, it’s ‘throbby’, the microcontroller equivalent of print("Hello, World!\n").
Digital Inputs
Note: There isn’t an equivalent button on the LoliBot, as the button on the LoLin32Lite resets the CPU! But this should work with the reflectance sensor on GPIO4
Most ESP8266 development boards have a button attached to GPIO0. This can be used to put the device into flash mode when it is reset, but once the device has started it can be used as a general purpose input::
import machine
pin = machine.Pin(0, machine.Pin.IN)
while True:
if pin(): print "True"
else: print "False"
Analog Inputs
Note: There’s isn’t really equivalent hardware on the LoliBot, sorry
There’s also an analog input pin, sadly only one on ESP8266::
import machine
adc = machine.ADC(0)
while True:
print adc.read()
On the ESP32 there are more ADC channels available. Currently, 8 channels are available on GPIO pins 32 through 39. The ADC can be programmed with variable attenuation and resolution, shared across all the channels.
import machine
machine.ADC.atten(machine.ADC.ATTEN_0DB)
machine.ADC.width(machine.ADC.WIDTH_11BIT)
adc = machine.ADC(machine.Pin(36))
while True:
print adc.read()
NeoPixels
Note: On the LoliBot, there’s a string of three APA106 NeoPixels on GPIO2.
“NeoPixels” is a name given to a family of coloured LEDs with an onboard controller. There’s a tiny controller in each pixel, and you can daisy chain them together to control many pixels from a single output line. There are several different versions of these chips, including RGB and RGBW varieties. Some examples:
- WS2812
- WS2812B
- APA106
To control them from MicroPython, use the neopixel library:
import neopixel
import machine
pix = neopixel.NeoPixel(machine.Pin(2), 3)
pix[0] = (255,0,0)
pix[1] = (0,255,0)
pix[2] = (0,0,255)
pix.write()
NeoPixels can be purchased from Ebay (etc) preassembled into ribbons, rings, grids and other shapes. Controlling a handful of pixels may seem like a silly thing to do when you’re used to having millions of pixels at your disposal, but it can be a lot of fun.
I2C
Note: LoliBot features an MPU-9250 accelerometer / gyrometer on pins 18 (SDA)/19 (SCL). It should work with the code below.
I2C is a shared serial bus which allows your microcontroller to communicate with multiple peripheral devices using a single pin.
It is part of the machine library
import machine
import time
i2c = machine.i2c(freq=400000,scl=machine.Pin(19),sda=machine.Pin(18))
i2c.writeto_mem(104,107,bytes([0]))
while True:
print("%6d %6d %6d" % struct.unpack(">3h", i2c.readfrom_mem(104,0x3b,6))
time.sleep(1)
The I2C library is still quite low level, and using it involves a lot of reading of datasheets. However, it is quite easy to wrap I2C functions into small library functions. For the BuzzConf Rocket Surgery project we wrapped this sensor up with a very small library